Navigation
Summary
Mini Pupper’s ROS version is based on Champ open source project, and we made some changes to Navigation functions.
1. ROS1(Noetic) Navigation based on Lidar
Before run the below steps, please confirm you already prepared all the environment in SLAM section.
1.1 Change the map file
Before running navigation, you should first change the launch file with the map you created.
roscd mini_pupper/launch
sudo gedit navigate.launch
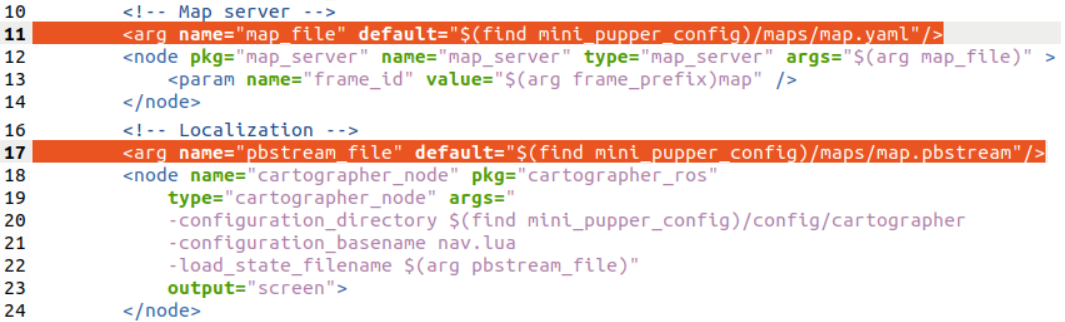
Then change arg of the map_file and pbstream_file.
1.2 Run the base driver
You should run this command on Mini Pupper
roslaunch mini_pupper bringup.launch
1.3 Run Cartographer(for localization) and Move_Base
You should run this command on PC If you are using gazebo, set the param /use_sim_time to true in the launch file.
roslaunch mini_pupper navigate.launch