Examples
1. Custom shell parts
Mini Pupper is an open source project, that means, you can custom what you want. You can find all the 3D printed shell files and custom them.
How about connect it to LEGO parts?

Or DIY it like @nisshan_
2. Custom Facial Animation
2.1 Prerequisites
HDMI Display
micro HDMI cable
Keyboard and mouse
a new custom picture(size: 320x240 pix)
2.2 Run
Connect MiniPupper to a display, a keyboard and a mouse.
Ubuntu login(The default password is mangdang)
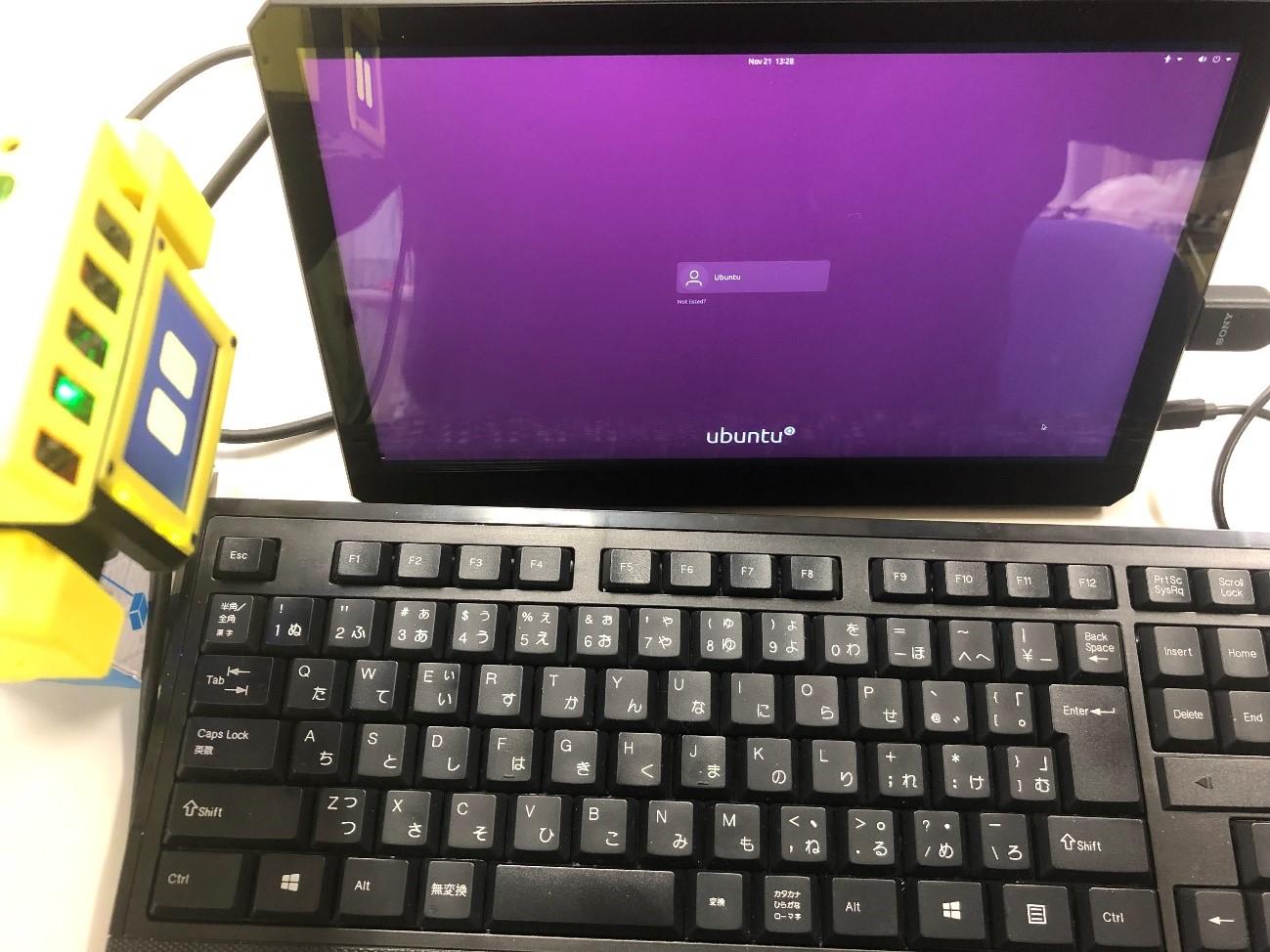
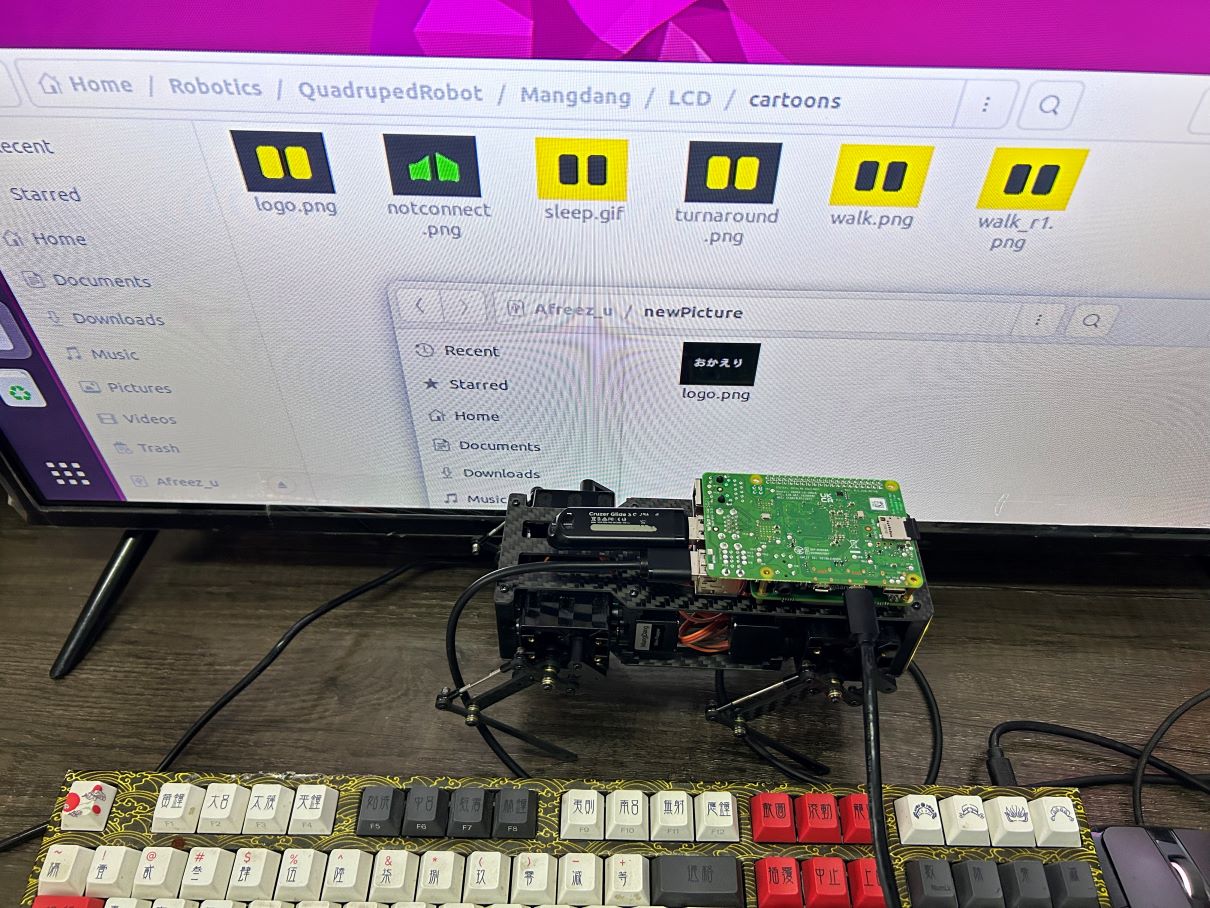
Replace the logo.png file using your custom picture
Reboot Mini Pupper and then you will see your custom picture
3. Keyboard controller
3.1 Keyboard controller based on nonROS version
The feature is based on PupperKeyboardController project, it’s Pygame-based keyboard controller for Stanford Pupper.
Install PyGame
pip install pygame
Controls
wasd: left joystick
arrow keys: right joystick
q: L1
e: R1
ijkl: d-pad
x: X
square: u
triangle: t
circle: c
3.2 Keyboard controller based on ROS version
Please refer to the SLAM section.
4. Web controller
Please refer to Mini Pupper Web controller project.
5. How to control a Mini Pupper PWM servo
Mini Pupper servo is a PWM servo, You can connect one servo to Pi board as the following picture shows, run the samle code,and then the servo will move. You can find the code here. You can run it on your Windows or Ubuntu with Python environment, just like the following picture shows.
6. Forward Kinematics
Lecture
Please study the basic knowledge of forward kinematics online first.
You can also refer to the following video clips come from Stanford Robotics Independent Study.
Forward kinematics lecture
Follow-up lecture to clarify some things
Sample code
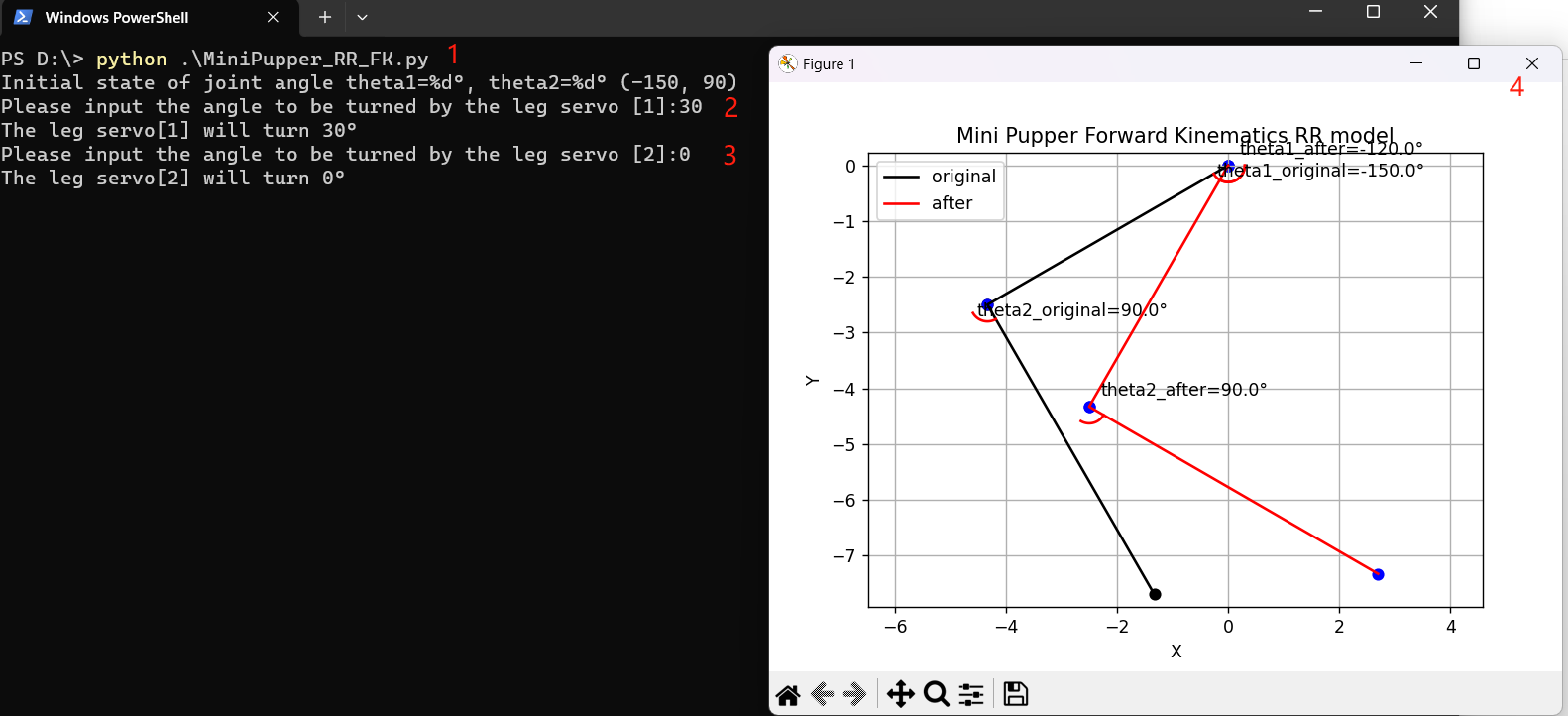
We prepared a simple Forward kinematics sample code based on Mini Pupper, you can try it here. You can run it on your Windows or Ubuntu with Python environment, just like the following picture shows.
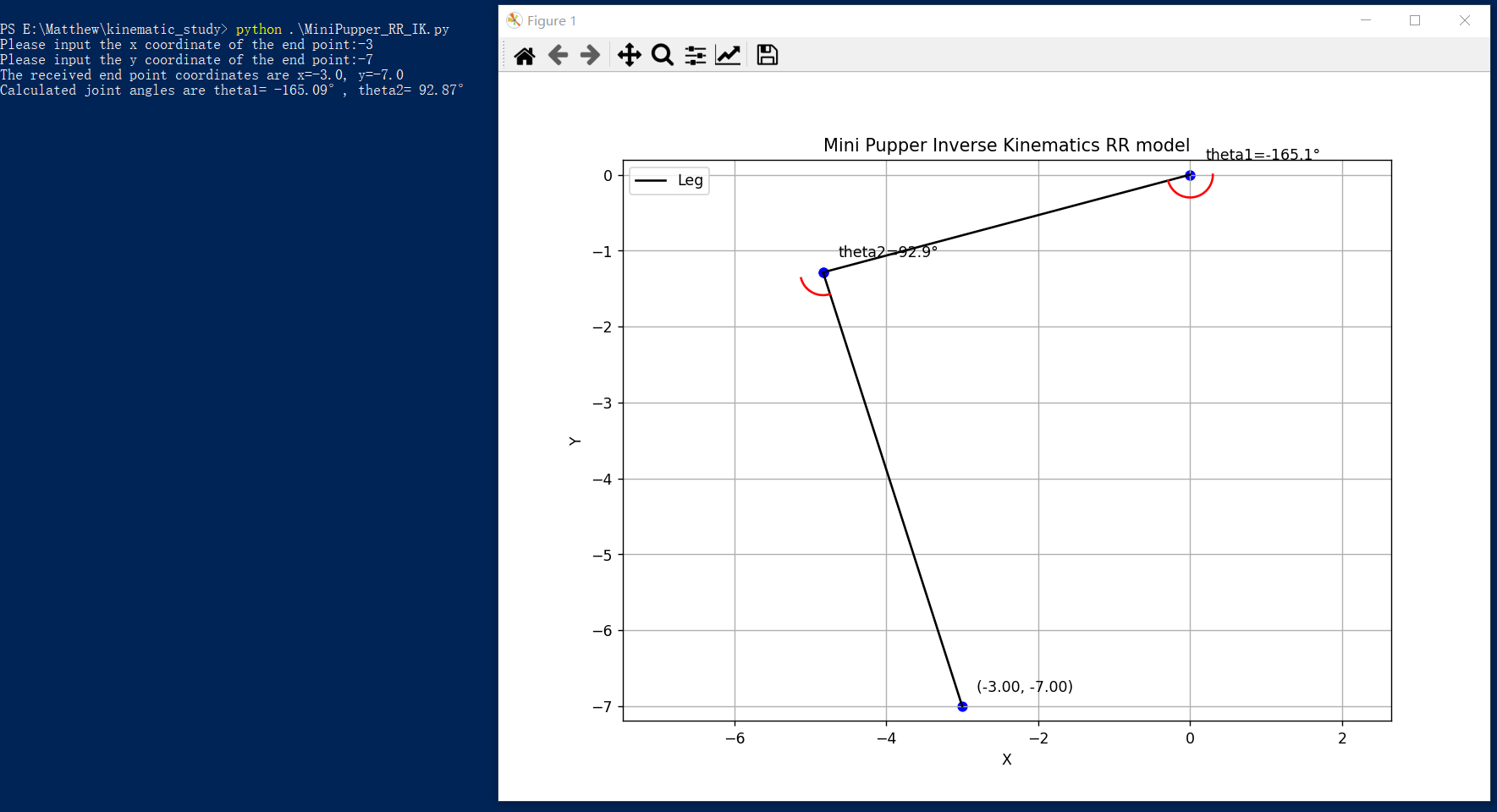
7. Inverse Kinematics
Lecture
Please study the basic knowledge of inverse kinematics online first.
You can also refer to the following video clips come from Stanford Robotics Independent Study.
Sample code
We prepared a simple Inverse kinematics sample code based on Mini Pupper, you can try it here. You can run it on your Windows or Ubuntu with Python environment, just like the following picture shows.
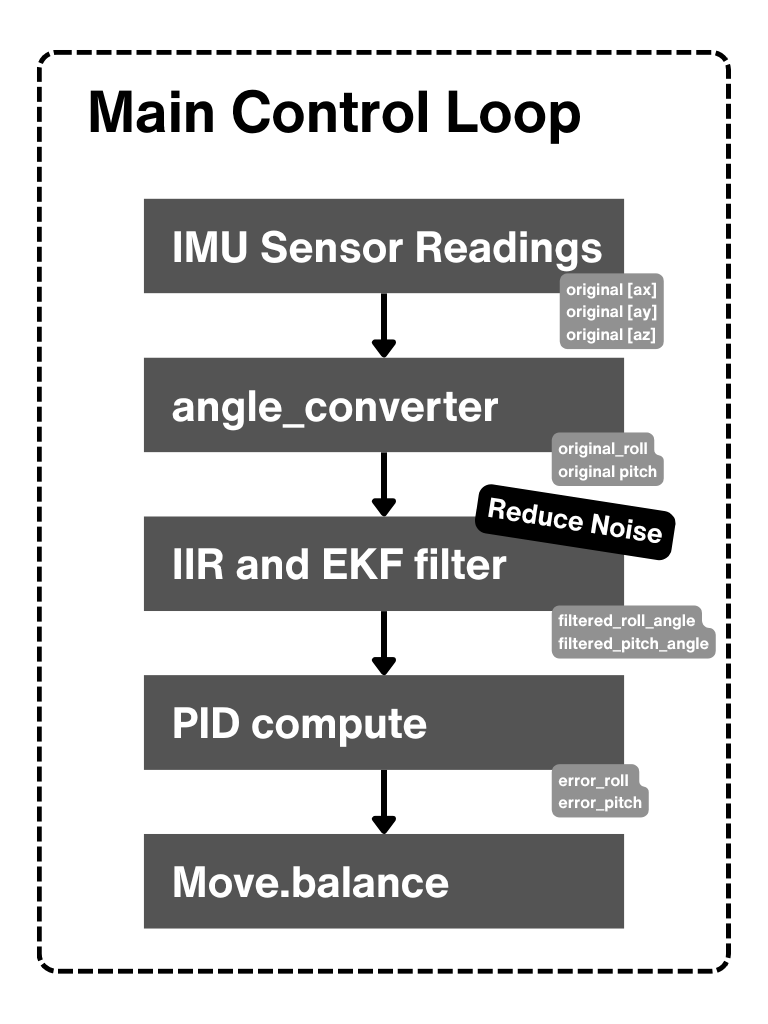
8. PID control
We prepared PID demo that utilize Minipupper2 IMU to create an auto-balance Mini Pupper, you can try it by
cd StanfordQuadruped
python IMU.Balancing.MP2.py
Try surfing with the pupper! See how it works in the following video clip.
The Demo architecture
9. Docker
9.1 Docker for Pupper
Dockerfile for Mini Pupper ROS package, comes from docker-mini-pupper-ros project.
9.2 Docker for Host
Host computer setup for interfacing with a Mini Pupper over a network, comes from mp_host_setup project.
10. Scratch program
Will update soon!