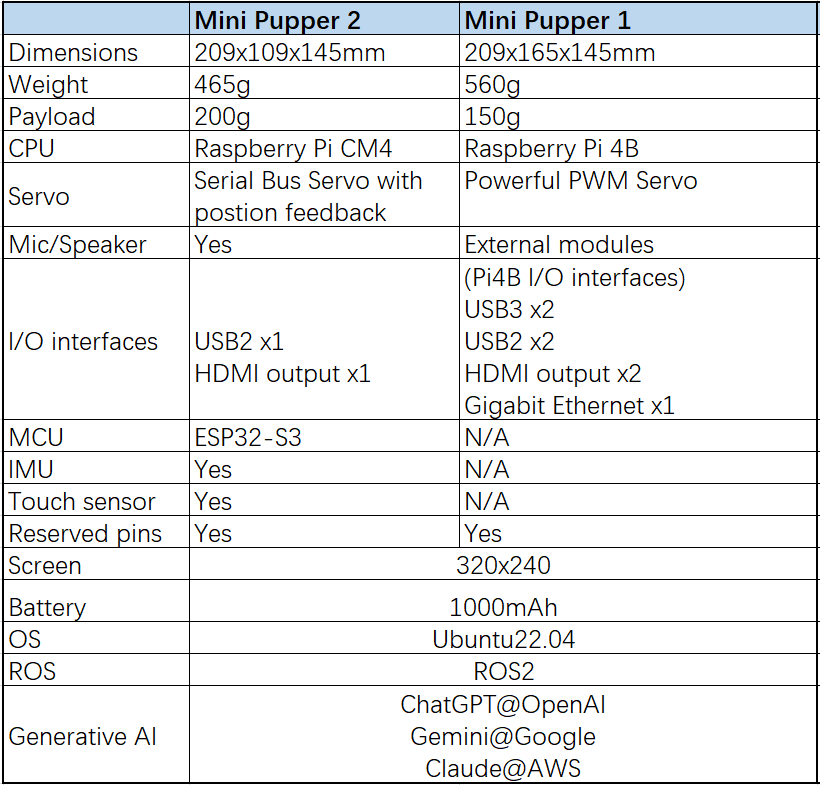
機能紹介

ハードウェアの仕様
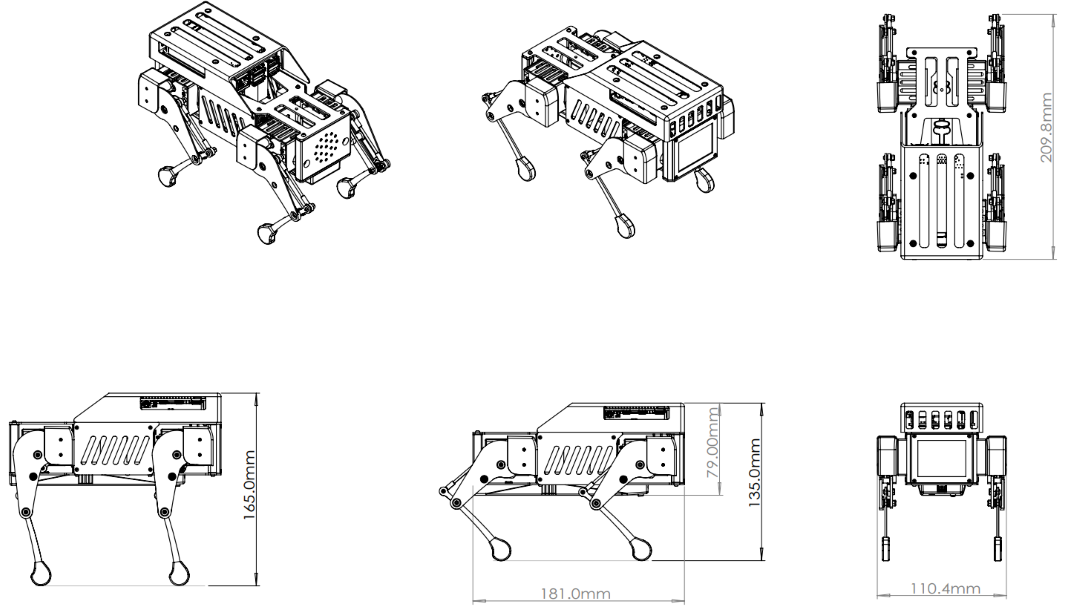
ミニぷぱ1の図面
アドオン

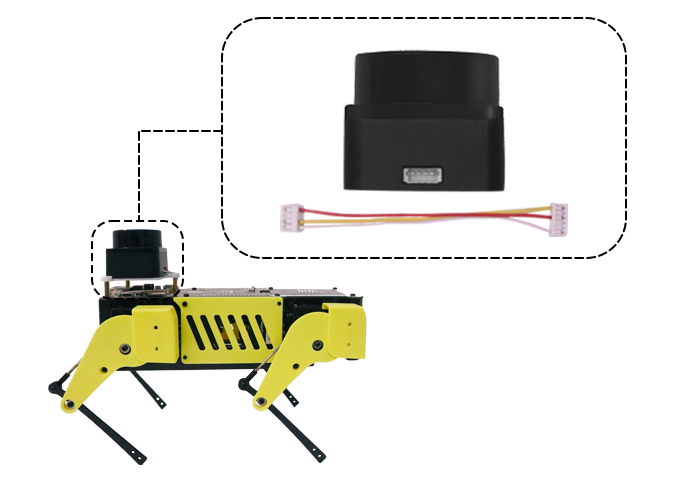
Lidarモジュール
ROS SLAM、Lidar に基づくナビゲーション機能を探索したい場合は、Lidar モジュールも必要です。STL-06P Lidar モジュールが適切に動作することは、当社のソース コードに基づいてのみ保証されており、他のチャネルから入手できるかどうかは保証されていません。かさばるワイヤを使用する代わりに、ロボットを簡単に接続できるように Lidar ケーブルをカスタマイズしました。
カメラモジュール
OpenCV カメラの AI 機能を調べたい場合は、Raspberry Pi v2 または v1.3 カメラ モジュールなどの単一の MIPI カメラを選択できます。