ソフトウェアキャリブレーション
ミニぷぱのソフトウェアキャリブレーション
1. キャリブレーションセットアップ
ツール
付属の工具のほかに、次のものが必要です。
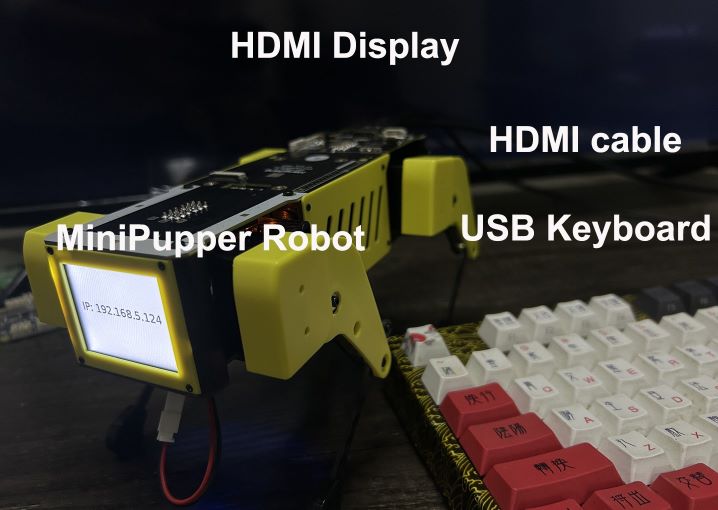
USB キーボード
USB マウス
HDMIディスプレイ
ディスプレイとRaspberry Piを接続するためのmicro HDMIケーブル
Step 1.1 Raspberry Piの起動
Raspberry PiとディスプレイをmicroHDMIケーブルで接続します。
Raspberry PiにUSBキーボードとマウスを接続する。
ミニぷぱの電池ボタンを3秒間長押しして、Raspberry Piを起動します。
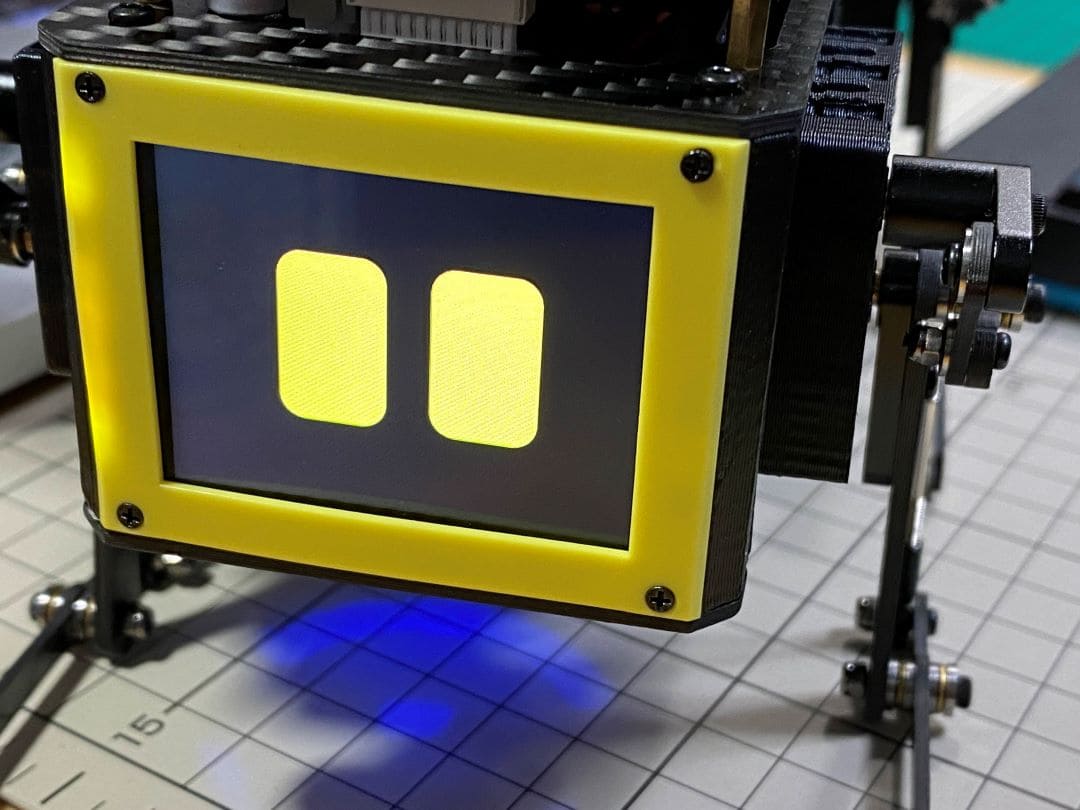
画面上にUbuntuが起動しているのが確認できれば成功です。ミニぷぱのディスプレイにも顔が表示されているはずです。
Step 1.2 ログイン
画面上のubuntuボタンを押し、ログインしてください。
初期設定のユーザー名:ubuntu
初期パスワード:mangdang
Step 1.3 キーボードを設定する(オプション)
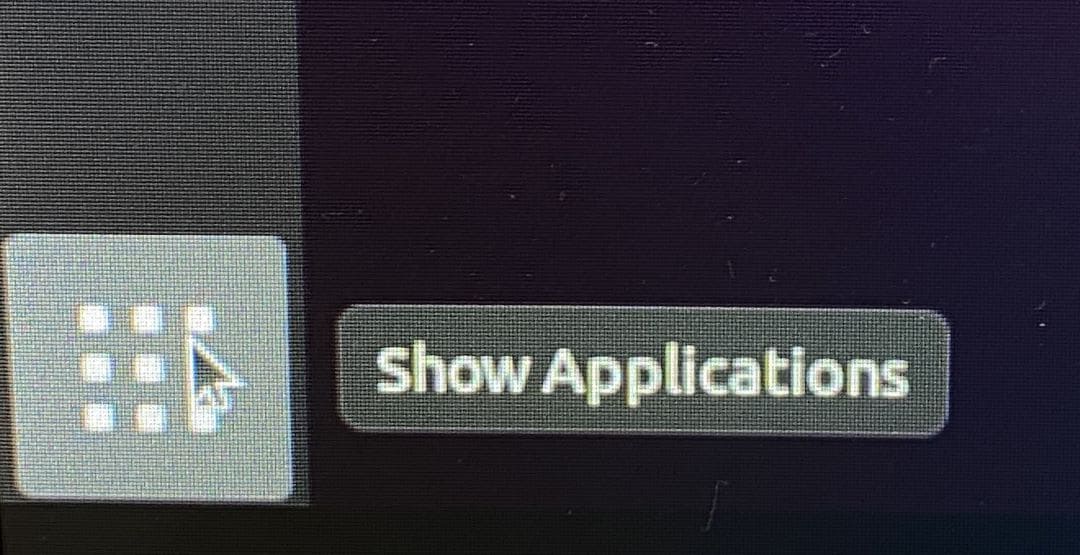
キーボードの種類(たとえば日本語キーボード)を変更する場合は、この設定が必要になります。左下隅のメニューボタンを押し、"settings"もしくは"設定""と入力し、設定アプリケーションを表示します。
「地域と言語」を選択し、「入力ソース」の「+」を押してください。出てきた画面で、その他に3つの点を選択し、日本語を入力して選択します。日本語を入力してください。
Step 1.4 ssh用のポートを開く(オプション)
PCからUbuntuへのssh接続を試みます。
ssh ubuntu@192.168.x.x -p 22
PCからssh接続ができない場合は、恐らく以下の設定が必要です。
sudo ufw allow 22
sudo ufw reload
ファイアウォールが動作していない場合は、次のようにしてください。
sudo ufw enable
2. キャリブレーション
Step 2.1 足のキャリブレーション(ROSイメージ用ではない)
以下のキャリブレーション動画をご参照ください。
ミニぷぱのキャリブレーションを行う際、サーボホーンの組み立て位置がずれていると、キャリブレーションがうまくいかず、サーボを壊してしまう可能性があります。以下のガイドに従ってください(ROSイメージではありません)。
ミニぷぱが4本の足を除いて組み立て済みであることを確認してください。
電源を入れ、デスクトップ上のCalibration Toolのアイコンをダブルクリックして起動してください。
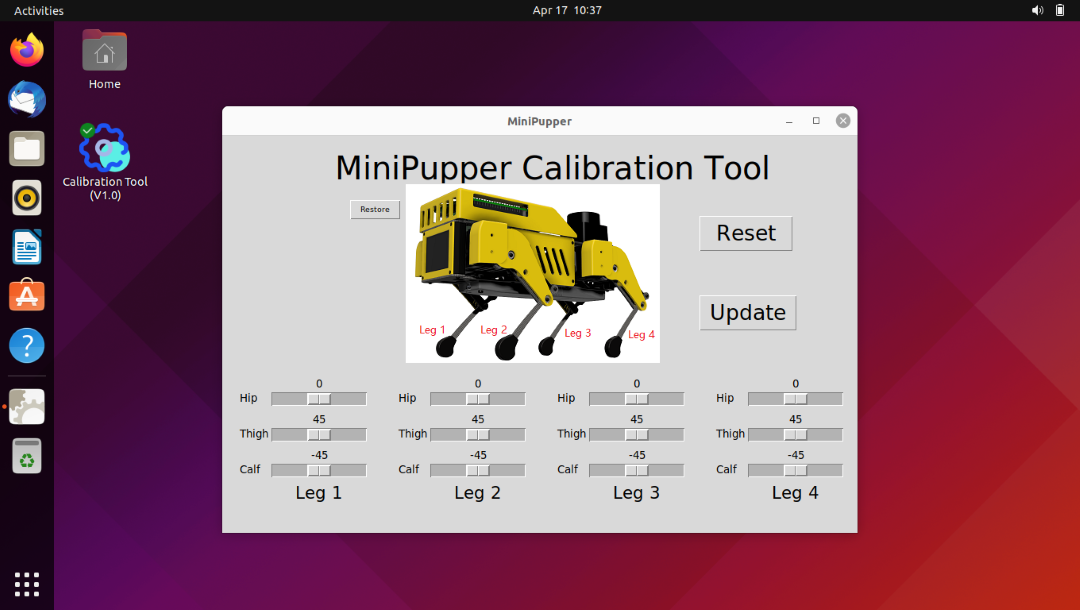
キャリブレーションの手順:各サーボをキャリブレーションする → ☑を押して設定を保存する → ×を押してキャリブレーションを終了し保存する となります。
※ スライドバーを動かすか、バーの近くのスペース位置をクリックして、各サーボを調整します。
※ リセットボタン: 前回から再起動したい場合。
※ リストアボタン: 工場出荷時の設定に復元し、× を押して閉じます。
キャリブレーションGUIツールを使って、#1 #4 #7 #10 の脚部サーボを水平位置にキャリブレーションします。
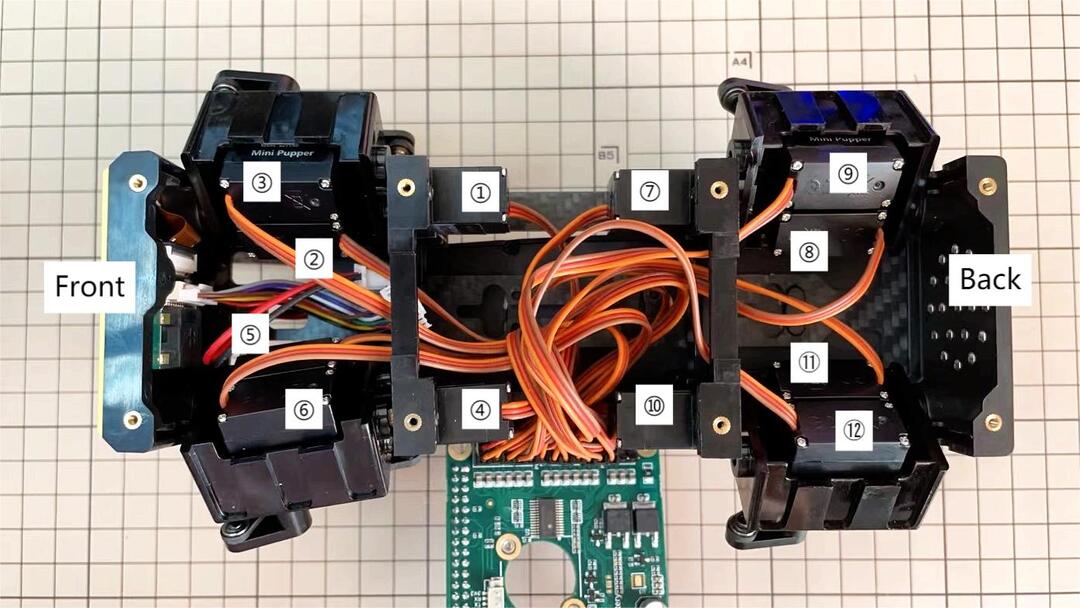
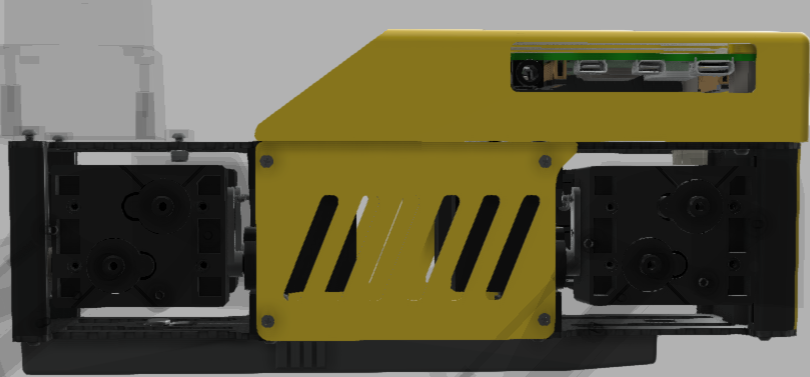
その後、下の写真のように、4本の足を正しい位置に取り付けます。
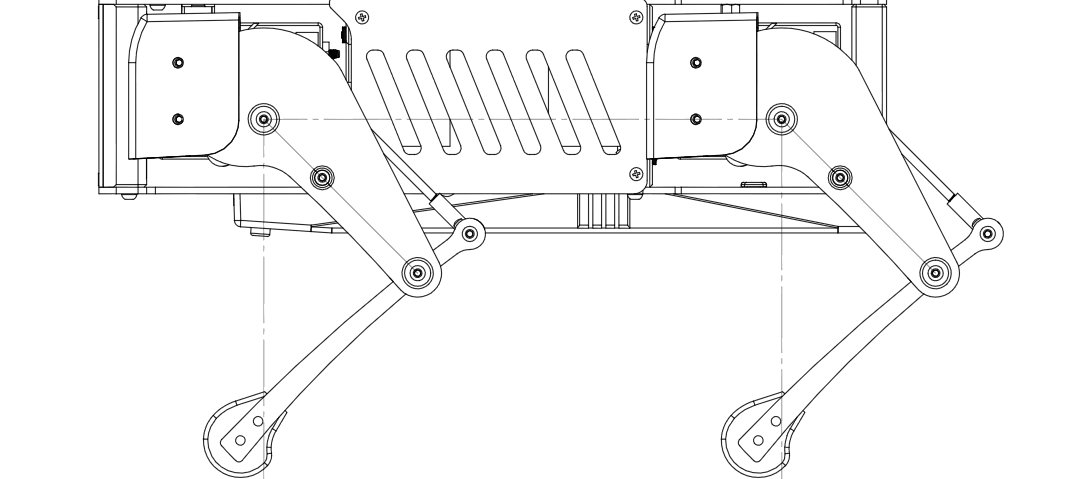
キャリブレーションGUIツールで足の位置を最適化する。足の角度は、画面上のスライドバーの位置と連動して変化します。もし動かない場合は、操作間違いが原因だと考えられます。もう一度手順に従って修正しましょう。
角度を測るには、iPhoneの傾きセンサーアプリや、定規、分度器などが使えます。私も定規と分度器を使ってみました。
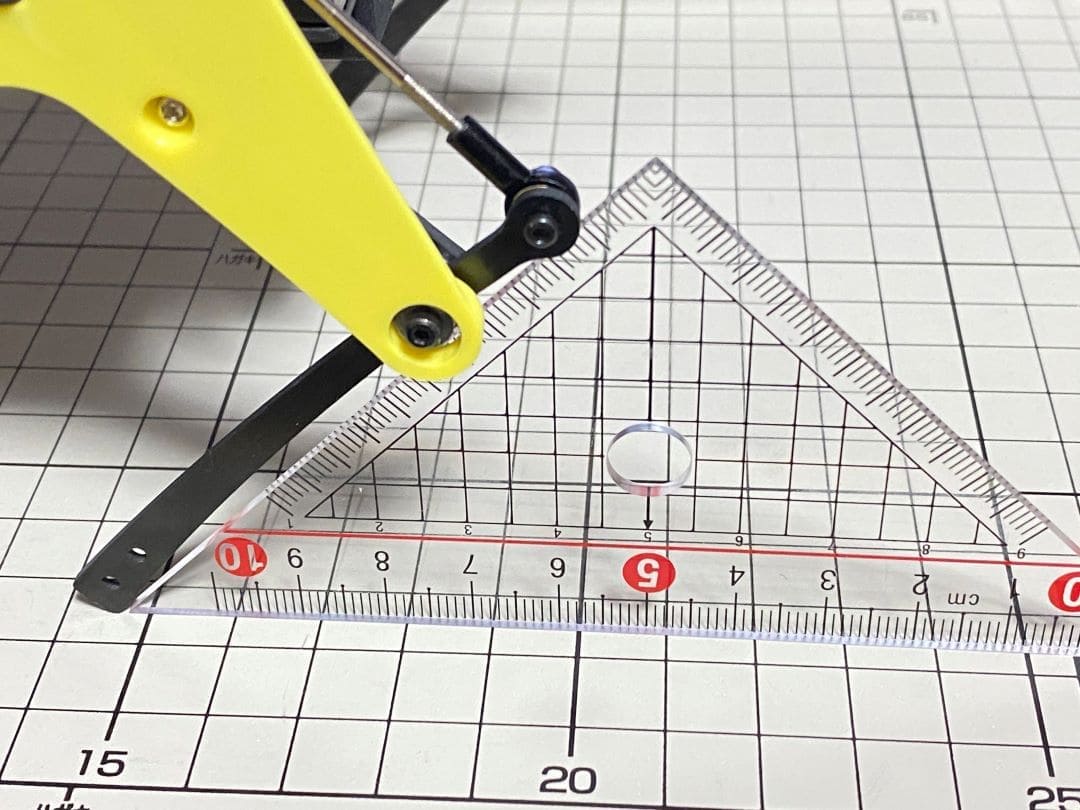
足の正確な傾きを測るのは少し難しいので、方眼紙のようなグリッドに足を置き、前後左右の位置が同じかどうかを確認し、最終調整するのがよいでしょう。
図のようにすべての足が45°の傾きになったら、Update を押して設定を保存します。×を押して、キャリブレーションアプリケーションを終了します。
Step 2.2 コントローラーの接続
次の章でご確認ください。
コントローラーで操作できればOKです。
ミニぷぱ2と2Proのソフトウェアキャリブレーション
1. キャリブレーションセットアップ
ツール
初心者の方は、キットに含まれる工具の他に以下のものが必要となります。
USB キーボード
HDMIディスプレイ
ディスプレイとPCB基板を接続するためのマイクロHDMIケーブル
これ以降は、PCを使用してミニぷぱにSSH接続してすべてを行うことができます。Step 1.4を参照してください。
Step 1.1 起動
PCB基板にマイクロHDMIケーブルを接続します。
PCB基板にUSBキーボードを接続します。
ミニぷぱのバッテリー ボタンを3秒間押したままにして起動します。
画面上で Ubuntu が実行中になっているのを確認できれば成功です。ミニぷぱのディスプレイに IP アドレスまたは「IP: no IPv4 address」も表示されるはずです。
Step 1.2 ログイン
画面上のubuntuボタンを押し、ログインしてください。
初期設定のユーザー名:ubuntu
初期パスワード:mangdang
Step 1.3 Wi-Fiの設定
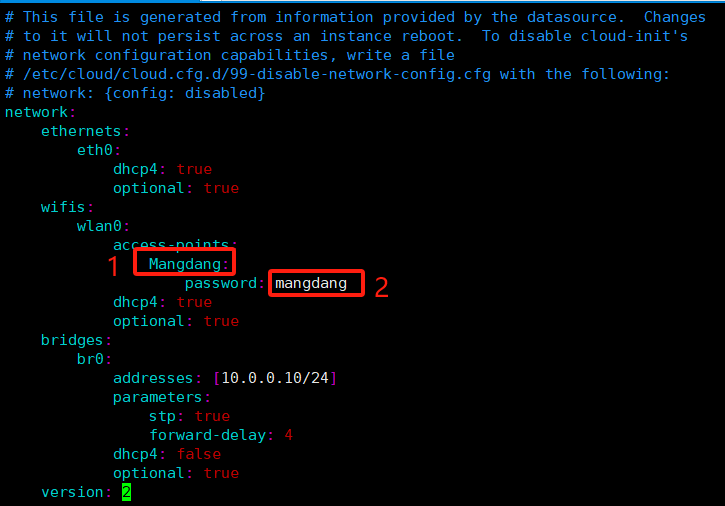
Wi-Fi 構成ファイル (50-cloud-init.yaml) を編集し、Wi-Fi を独自のものに設定します。
sudo vi /etc/netplan/50-cloud-init.yaml
# Edit and save
sudo netplan apply
sudo reboot
mini_pupper_webコントローラも参照できます`mini_pupper_web_controller <https://github.com/mangdangroboticsclub/mini_pupper_web_controller>`_
ステップ 1.4 HDMI ディスプレイなしで SSH のポートを開く
スマートフォンを使用して、ミニぷぱが使用するデフォルトの Wi-Fi を設定します。
Wi-Fi名: Mangdang
Password: mangdang
ロボットの電源を入れ、液晶ディスプレイを確認します
液晶ディスプレイに「IP: no IPv4 address」と表示されたら、ロボットを再起動します。
液晶ディスプレイに IP アドレスが表示されたら、PC からロボットに SSH 接続します。
ssh ubuntu@192.168.x.x
PCからssh接続ができない場合は、恐らく以下の設定が必要です。
sudo ufw allow 22
sudo ufw reload
ファイアウォールが動作していない場合は、次のようにしてください。
sudo ufw enable
2. キャリブレーション
Step 2.1 足のキャリブレーション
以下のキャリブレーション動画をご参照ください。
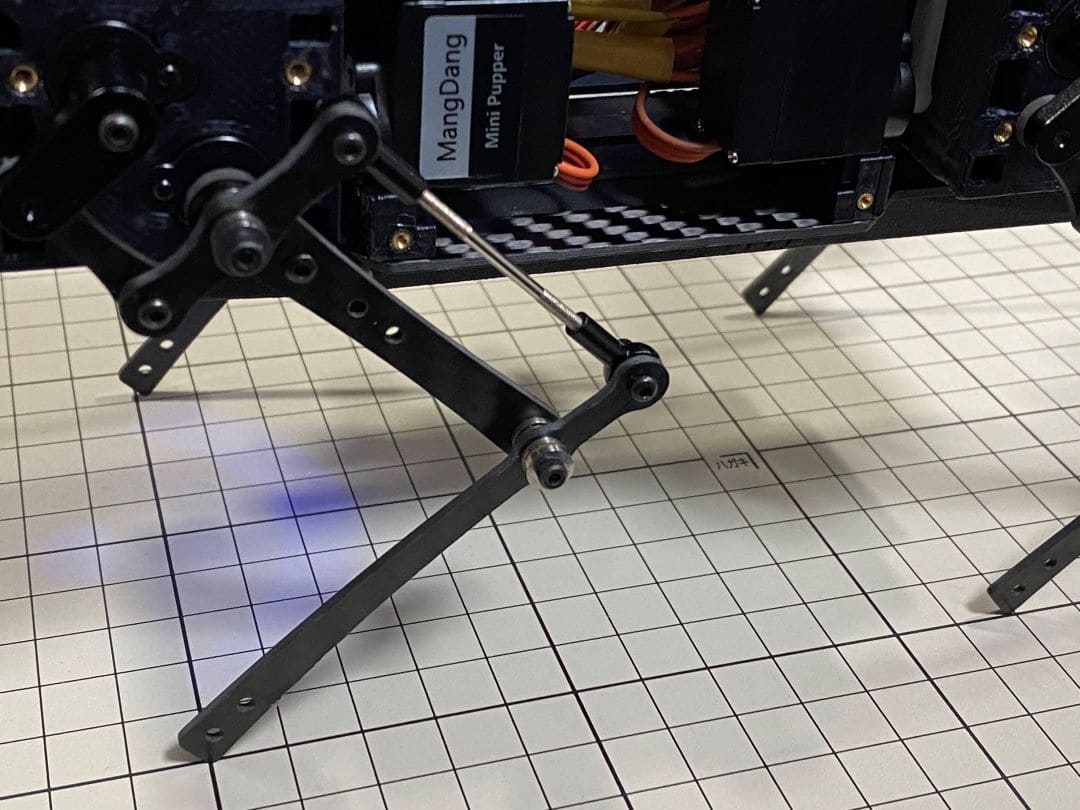
その後、下の写真のように、4本の足を正しい位置に取り付けます。
足の正確な傾きを測るのは少し難しいので、方眼紙のようなグリッドに足を置き、前後左右の位置が同じかどうかを確認し、最終調整するのがよいでしょう。
図のようにすべての足が 45° の傾斜になったら、「s」を押して設定を保存します。「q」を押してキャリブレーションアプリケーションを終了します。
Step 2.2 Web ブラウザを使用して実行
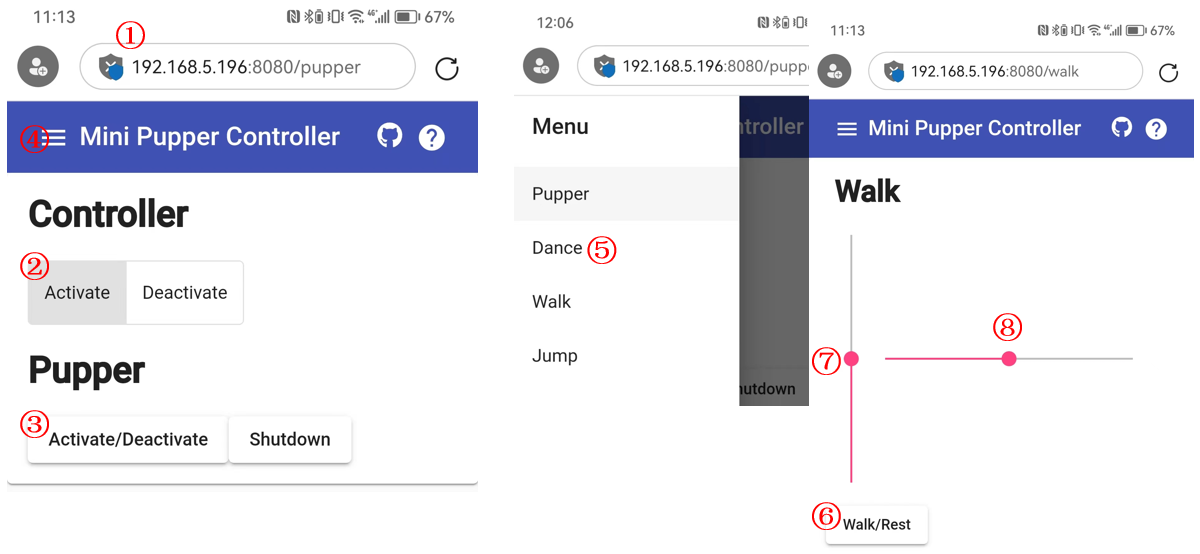
Web ブラウザで http://x.x.x.x:8080 にアクセスします。x.x.x.x は ミニぷぱの IP アドレスです (例: http://192.168.5.196:8080)
「Controller」タブの「Activatate」ボタンをクリックします。
「Pupper」タブの「Activatate/Deactivate」ボタンをクリックします。
左上隅の「≡」アイコンをクリックします。
「Walk」オプションを選択します。
「Walk/Rest」ボタンをクリックします。
スクロールバーを使用してミニぷぱを制御します